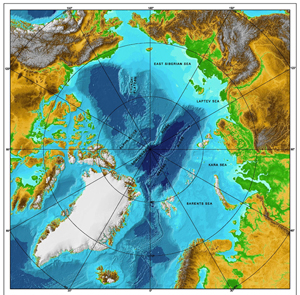
Arctic Ocean (Courtesy WHOI)

SeaBED, the prototype for JAGUAR, entering the water (Photograph by Mike Naylor, SSL)
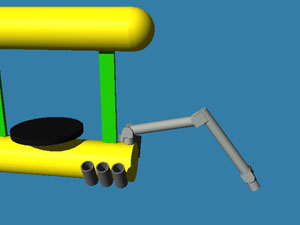
JAGUAR undersea vehicle with arm (Model by Stephen Roderick, SSL)

Tube worms are one life form that may live on the Gakkel Ridge (Courtesy of WHOI)
Under funding from the National Aeronautics and Space Administration (NASA), the Space Systems Laboratory (SSL) is working closely with the Woods Hole Oceanographic Institute (WHOI) under NASA’s Astrobiology Science and Technology Experiment Program (ASTEP), to develop technologies enabling autonomous planetary sample collection by merging NASA-supported robotics technologies with advanced autonomous undersea vehicles.
The team is developing a submersible capable of autonomously collecting samples from the floor of the Arctic Ocean and returning them to the surface. The addition of dexterous robotic technology from the SSL’s dexterous robotics group to the existing WHOI SeaBED/JAGUAR autonomous undersea vehicle, along with autonomous vision based control algorithms developed by SSL for its SCAMP free-flying vehicle, will form a system that will be able to sample hydrothermal vent exit fluids under the ice sheet of the Arctic’s Gakkel Ridge location. The autonomous undersea vehicle will descend 5,000 meters to the hydrothermal vent fields of the Gakkel Ridge, perform its sampling tasks, and return to the surface without any direct human interaction.
Considerable scientific and public interest has been generated by the discovery, almost two decades ago, of deep volcanic vents in the mid-Pacific and mid-Atlantic ocean rifts, which support rich biological environments without relying on sunlight. Hydrothermal vents provide perhaps the most “alien” settings for science investigations available without space flight, however, technology does not currently exist to sample the life forms around these Arctic vents. The underwater environment at great depths gives the entire mission direct and immediate relevance to one of Jupiter’s satellites, Europa, which many feel is the most likely place for extant nonterrestrial life. With such similarities, this development for autonomous sampling and return missions allows us to simulate future complex planetary missions, while doing real science that is valuable in its own right.
This project will be the first to obtain biological samples from the Arctic sea floor, which will tell scientists how much commonality in evolution exists between hydrothermal ecosystems in widely separated areas. It also will be the first mission ever to obtain biological samples autonomously. Studying the returned samples will help biologists to understand how life can survive in such harsh climates and may provide clues to what life might look like elsewhere in the Solar System. Performing a mission of this complexity without human interaction will be necessary for exploration of the icy moons of the outer Solar System such as Europa. The lessons learned from this project will help in making such robotic exploration possible.
Click on the image below to download a one page summary describing the project.
(2.2 Mb PDF)
© 2003- Space Systems Laboratory
last updated: