A principal focus of Phase 1 is to develop an initial prototype actuator module, to be used for verifying performance and mass projections for MORPHbot robotic actuators. Based on over 25 years of developing robotic manipulators, the Space Systems Laboratory (SSL) realizes that lessons learned from the initial development of an actuator module will form the basis of an evolutionary redesign, which leads to a more capable and reliable design in later phases.
The lightweight modular actuator developed for phase 1 is shown below and it consists of a brushless DC motor, compact harmonic drive for torque amplification, and incremental and absolute encoders for actuator control all packaged inside an aluminum housing.
(click on the photo for a larger image) |
(click for a 6.6 Mb AVI or a 2.5 Mb QuickTime movie of the actuator run-in testing) |
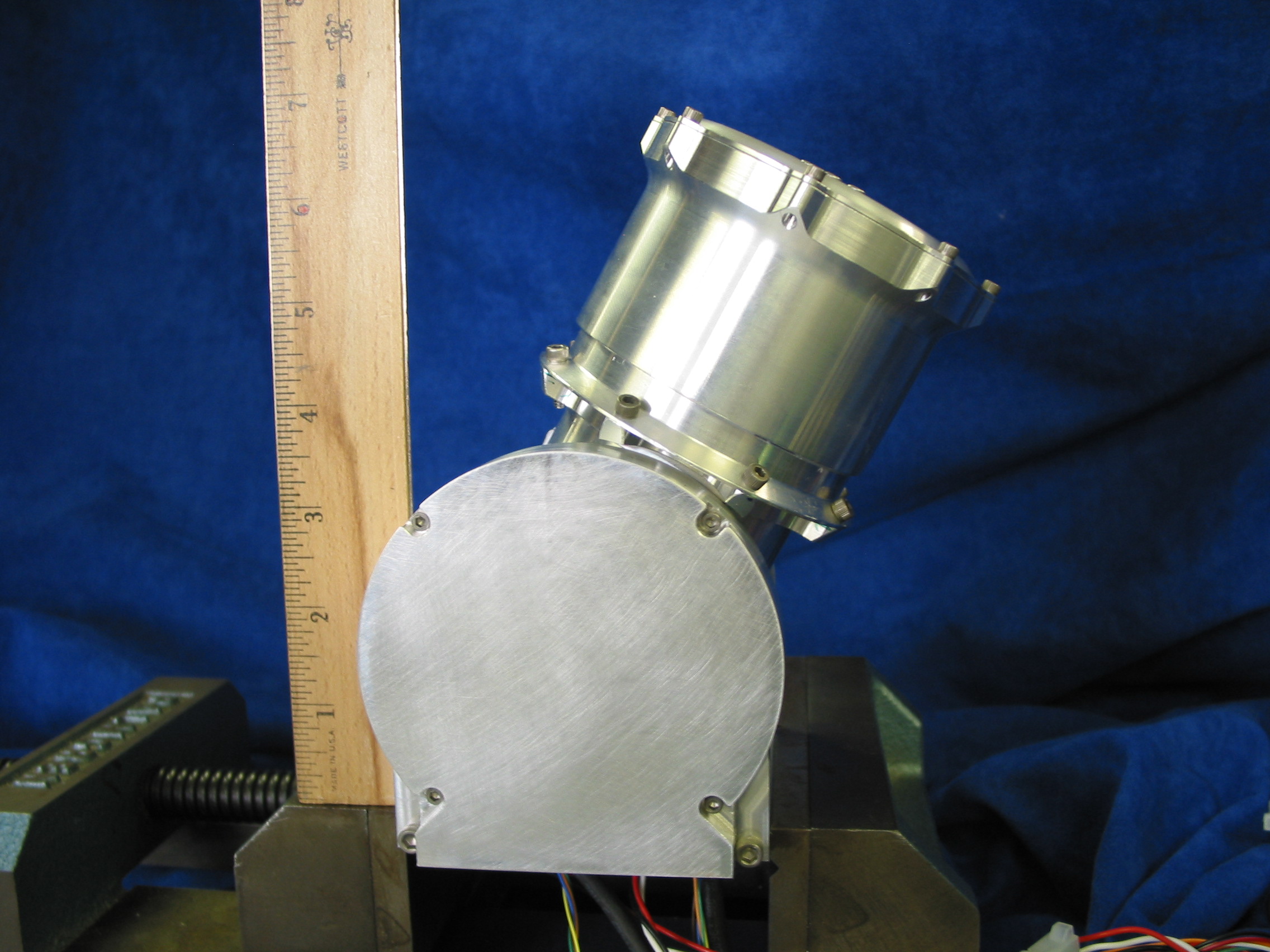

The roll-pitch actuator has a mass of 2.0 kg (4.4 lbm) and an outer housing diameter of 84 mm (3.3 in). This is a factor of 10 reduction in mass from the Ranger elbow actuator (shown below next to the DARPA roll-pitch actuator) which has a mass of 19.7 kg (43.4 lbm).

(click on the photo for a larger image)
MORPHbot actuator |
Ranger elbow actuator |
|
mass |
2.1 kg (4.6 lbm) |
19.7 kg (43.3 lbm) |
diameter |
84 mm (3.3 in) |
135 mm (5.375 in) |
torque |
67 N-m (40 ft-lbf) |
81 N-m (60 ft-lbf) |
When three roll-pitch actuators are built up into a 6 degree-of-freedom arm, it is indeed small and lightweight when compared with the Ranger manipulator developed by the SSL for NASA.
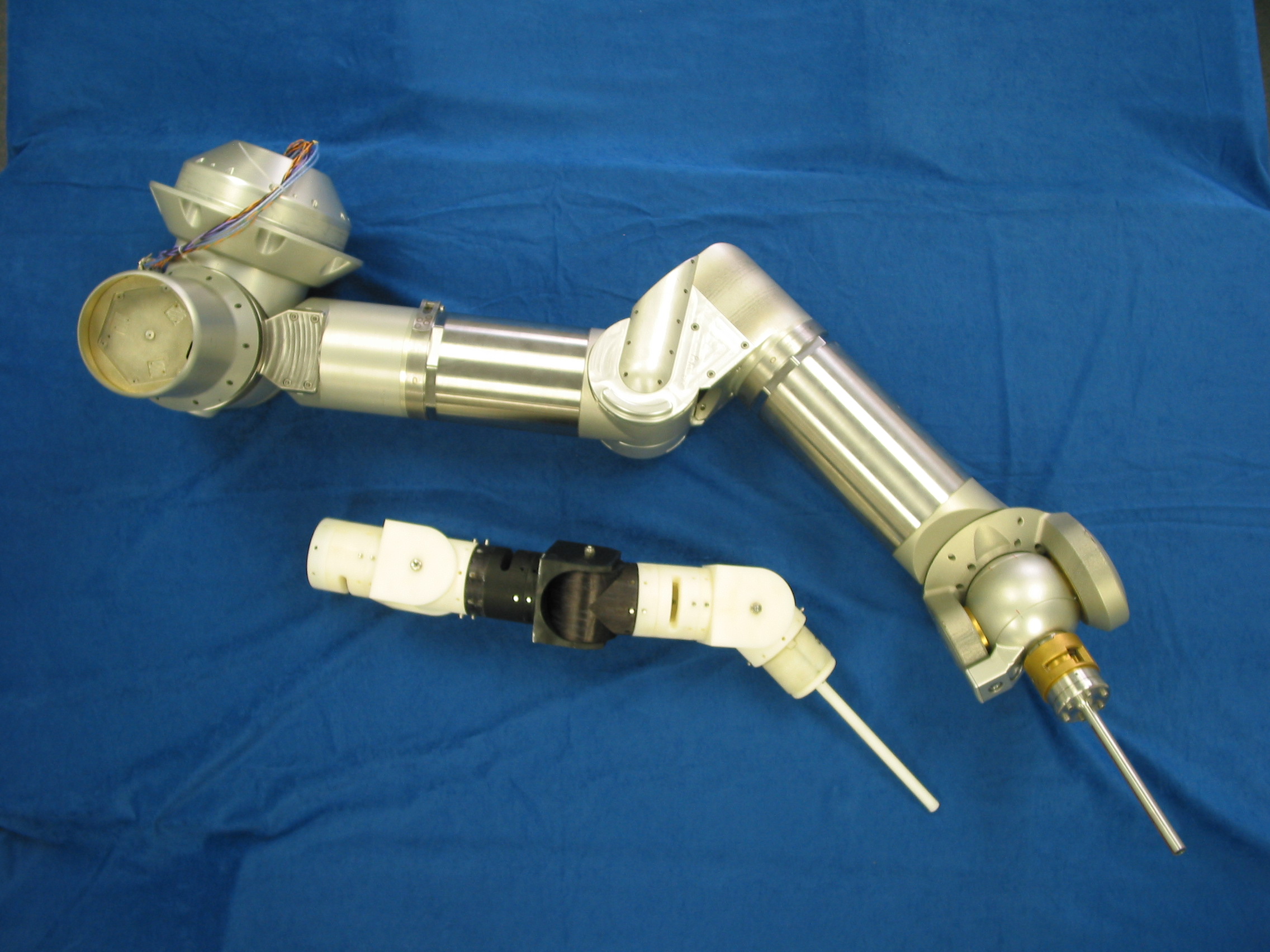
(click on the photo for a larger image)
DARPA manipulator |
Ranger manipulator |
|
mass |
10 kg (22 lbm) |
77 kg (170 lbm) |
diameter |
84 mm (3.3 in) |
135 mm (5.375 in) |
length |
75 cm (30 in) |
135 cm (53 in) |
tip force |
53 N (12 lbf / 5 kgf) |
133 N (30 lbf) |
torque |
TBD |
50 N-m (30 ft-lbf) |
© 2003- Space Systems Laboratory
last updated: