|
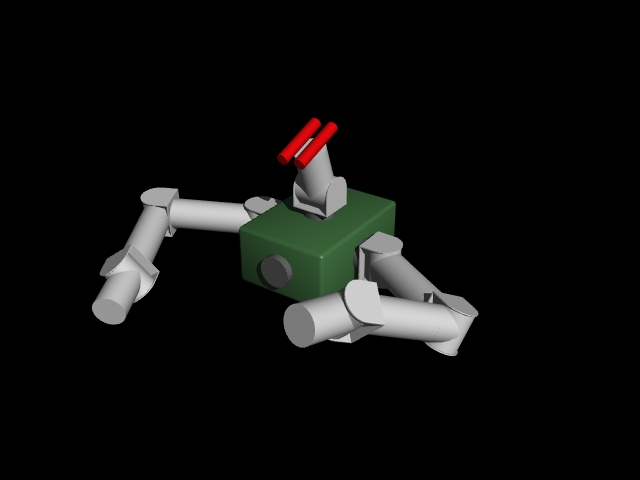
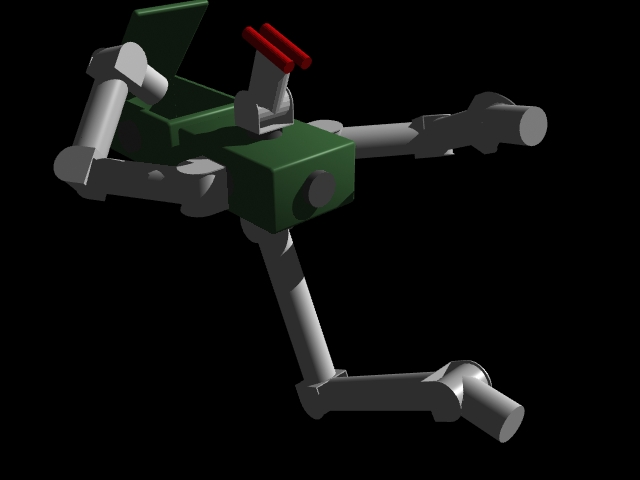
A simple MORPHbot can be configured with two 6-DOF arms mounted to a standard node, along with a 2-DOF camera module. This system, which would be ideal for maneuvering over a large platform while autonomously scanning for micrometeoroid damage.
|
||
 |
|
|
|
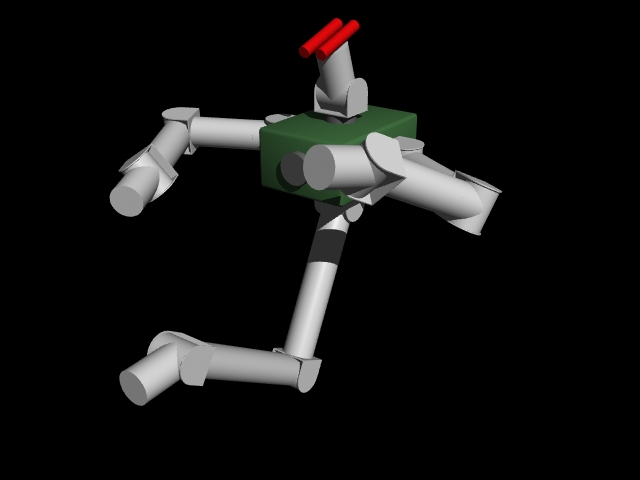
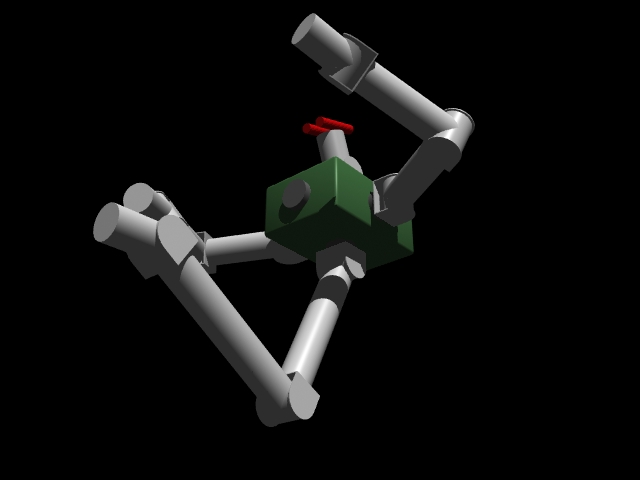
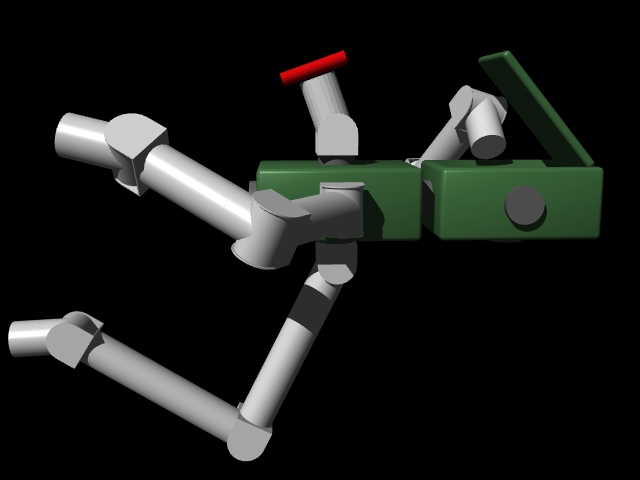
With the addition of a third manipulator, the MORPHbot shown above gains more capability. This three-armed unit can transport a payload (such as an orbital replacement unit) with the third manipulator while performing hand-over-hand mobility along a truss structure. At the work site, one manipulator can provide positioning and stability while the other two arms perform the dexterous servicing tasks.
|
||
 |
 |
 |
|
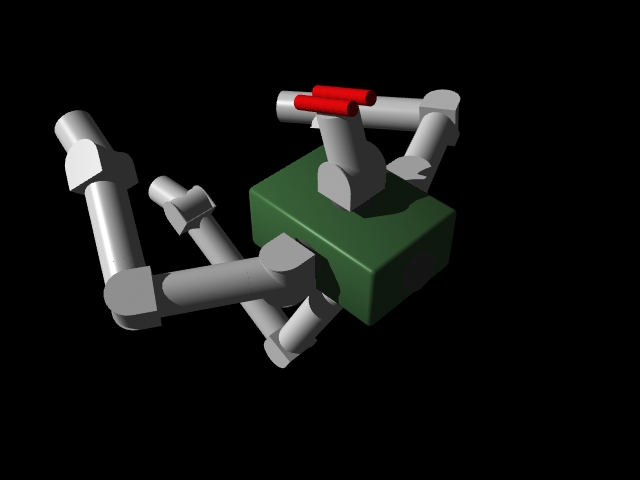
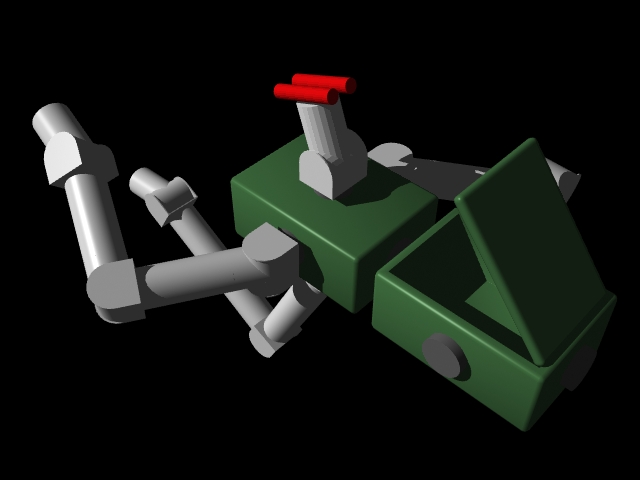
To further expand transport capacity, a storage pack could also be added to the back of the MORPHbot above. This pack could be used to transport multiple smaller servicing components, or to safely store thermally sensitive devices during transits.
|
||
 |
 |
 |
© 2003- Space Systems Laboratory
last updated: