Introduction to Space Mission Design: Space Robotics
Lecture for University of North Dakota's space.edu's Introduction to Space Mission Design (EE 490/ME 490/SpSt 470/CSc 491)
26 March 2002
Three members of the team gave a video conference lecture to a University of North Dakota class on space mission design, The presentation (3.7 Mb PDF) included video clips which are below (click on the picture to start the video).
|
Impedance testing of an NBVI arm
|
4 DOF NBVII engineering wrist testing
|
Test of entire NBVII engineering arm
|
Space Systems Laboratory
|
NASA/Marshall Space Flight Center Neutral Buoyancy Simulator Operations
|





Engineering arm first motion
11 March 2002
We are pleased to announce a significant milestone: first operation of a complete Mk. 2 Ranger arm! The shoulder module was mated to the elbow and wrist modules this evening for the first time, and then powered up. We were only able to command one module at a time through a serial cable, but that was sufficient to demonstrate closed-loop control of the three shoulder joints simultaneously. Strength was adequate to handle the rest of the arm at full extension and quite a bit of weight. At about half extension, approximately one JM unit (one JM unit = 160 lbf net weight after lunchtime) could be applied to the end with little deflection.
Thanks to everyone who helped this come together!
|
|
|
Engineering test stand in operation
8 March 2002
(update by Brian Roberts)
A test stand was built to hold the engineering positioning leg pitch joint. The leg supports a test head which in turn supports parts of the engineering arm, NBVII arms while they are being tested, or even EVA mock-up arms for demonstration purpose. The picture below shows the engineering shoulder bolted on the robot's right side (left side of the picture), the engineering elbow and wrist bolted to the robot's right side (right side of the picture), and the EVA mock-up video manipulator with the NBVII stereo camera housing.

Click on the picture for a larger image
Soldering the shoulder backplane
7 March 2002
(update by Brian Roberts)
As an example of the electronics work that goes into making the arms operate, here is a portion of the process of soldering wires to the backplane. The video is at five times the normal speed.

Click on the picture to start the video (2.7M QuickTime)
Engineering elbow and wrist run with flight code
1 March 2002
(update by Stephen Roderick)
Today, we successfully ran the wrist and the elbow, along with the rest of the vehicle flat-sat, via the flight code. This included running the joints via both the text and graphical control stations. This was the first time that the elbow was run from the flight code, and it worked out of the box with no changes necessary.
Thanks to Russ and the Electronics Team for giving us well tested and reliable hardware!
Stay tuned for upcoming deliveries: cartesian controller, hand controllers moving joints, and a graphical simulator!

Click on the picture for a larger image
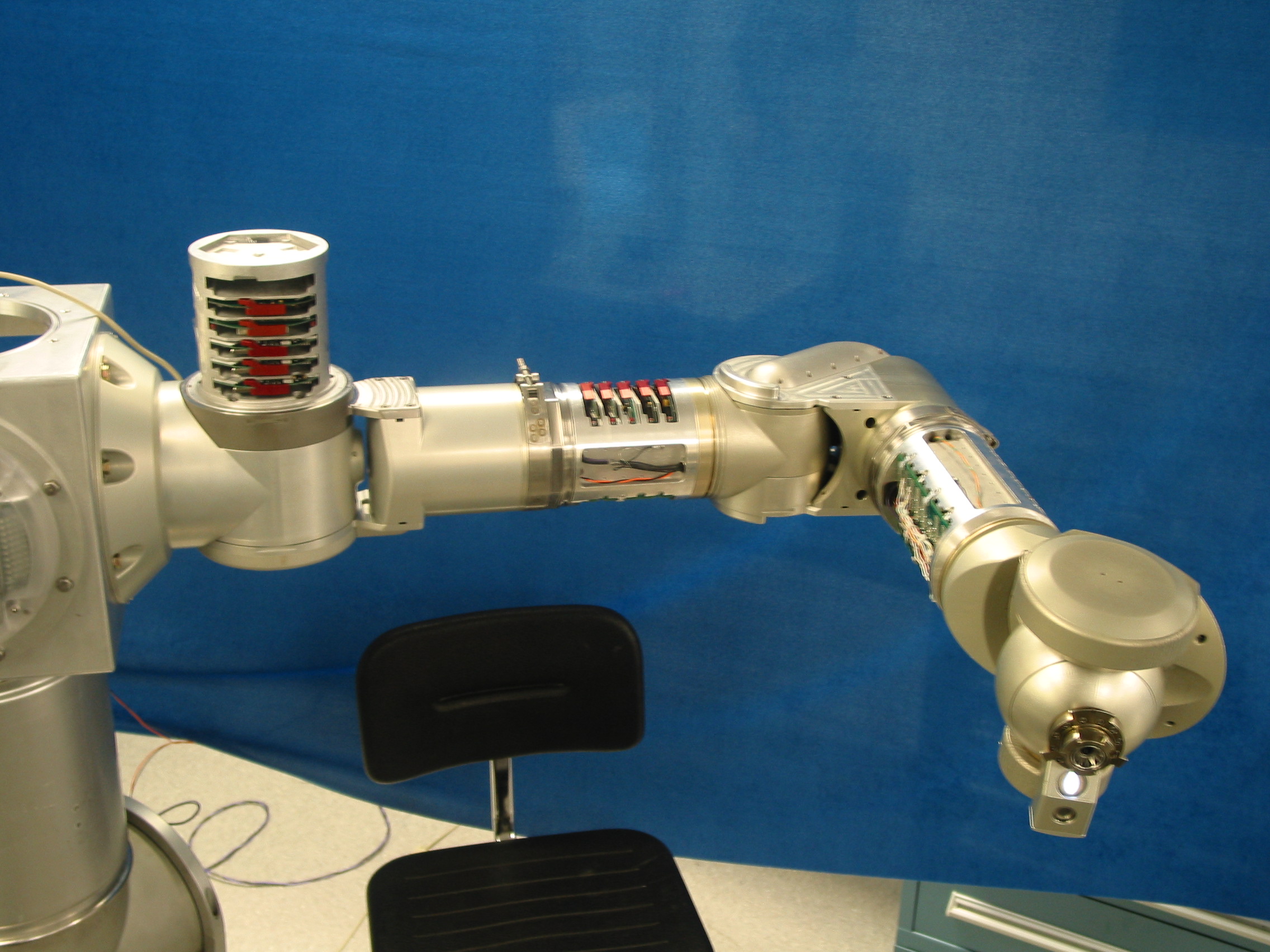
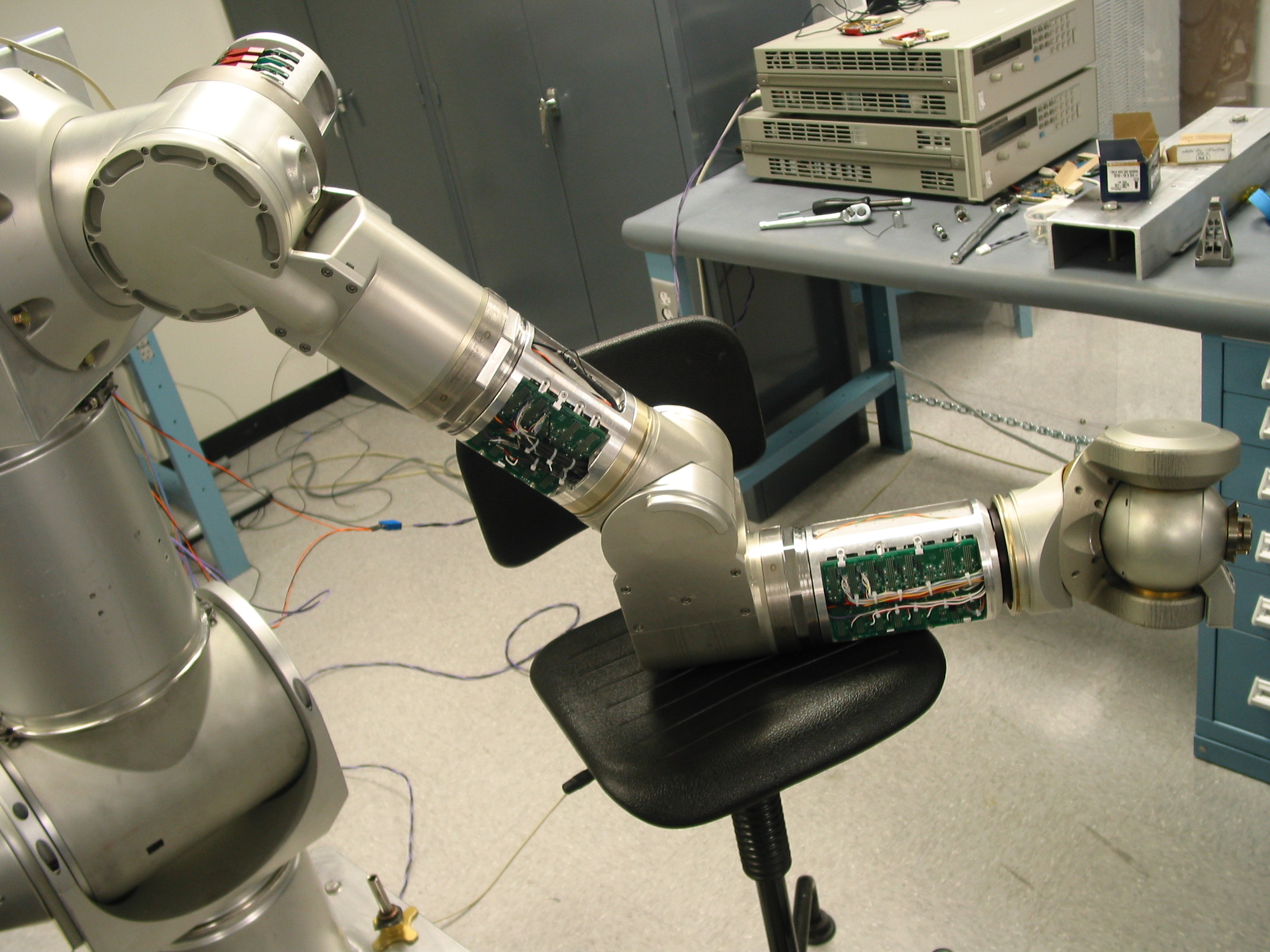
Engineering elbow and wrist
20 February 2002
(update by Brian Roberts)
The engineering elbow and wrist were mounted on an old neutral buoyancy vehicle body that was bolted to the floor for more stability. Pictures and video of the set up are shown below.
|
|
|



Ranger dexterous arm featured in the January 2002 issue of Military & Aerospace Electronics
5 February 2002
(copy courtesy of Robert Renshaw of Payload Systems Inc.)

Click on the picture for a larger image (98 K)
Engineering elbow and wrist run-in testing
31 January 2002
(update by Jean-Marc Henriette)
For the first time in history, a group of Ranger NBVII actuators breathed and moved at the same time. After roughly 30 minutes of run-in testing time, the following things were found to still work:
- Elbow Pitch
- Wrist Roll
- Wrist Pitch
- Wrist Yaw
- Hand Roll
- Camera
- 1553 Channel A
1553 Channel B/A were apparently sheared off due to excessive rotation of the wrist roll. A video clip of the testing appears below.

Click on the picture to start the video (8.5M QuickTime)
© 2003- Space Systems Laboratory
last updated: