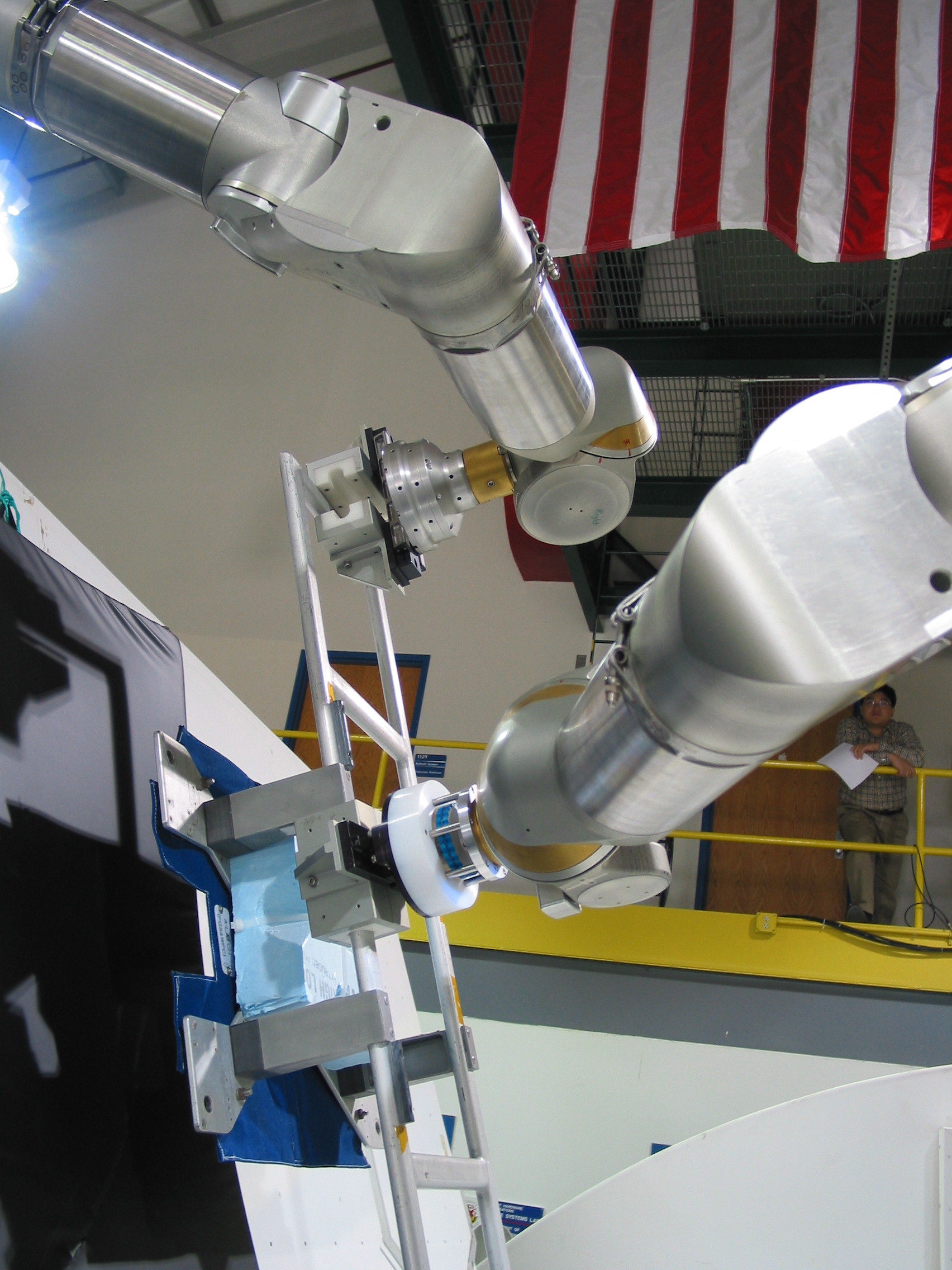
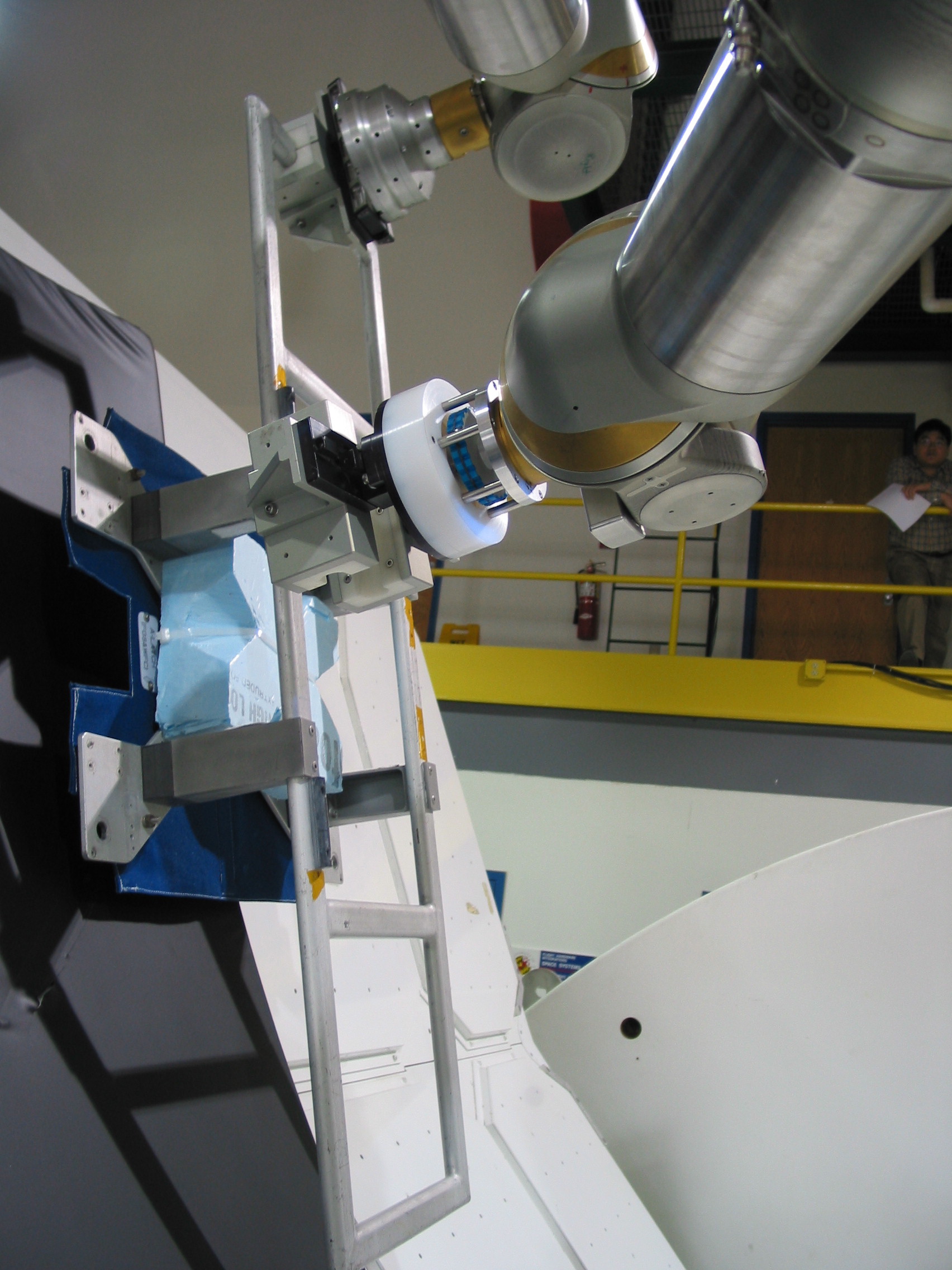
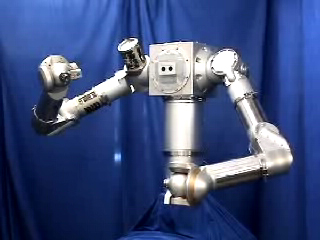
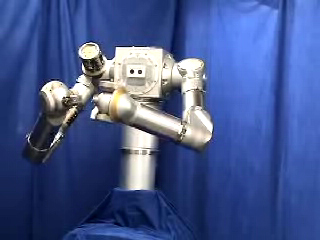
Engineering arm and right dexterous arm working together
2 June 2003
(update by Walt Smith and Stephen Roderick)
In a simulation of the ability of two Ranger dexterous arms to work together, the engineering arm and the right dexterous arm were used to pass a handhold from one arm to another and back again.
One of the tasks planned for the next Hubble Space Telescope (HST) servicing mission is the changeout of one of HST's three Fine Guidance Sensors (FGS). After a handhold is installed on the FGS by the astronauts, the handhold is used to guide the FGS along guide rails and out of the telescope. The handhold is stowed on a fixture in the cargo bay of the shuttle.
The following pictures and video show the Ranger engineering and right dexterous arms passing the handhold between both arms and back again. The video is at three times the normal speed.
|
Photos (click on the picture for a larger image) |
Video (click on the picture to start the video) |
||
|
|
|
|
|


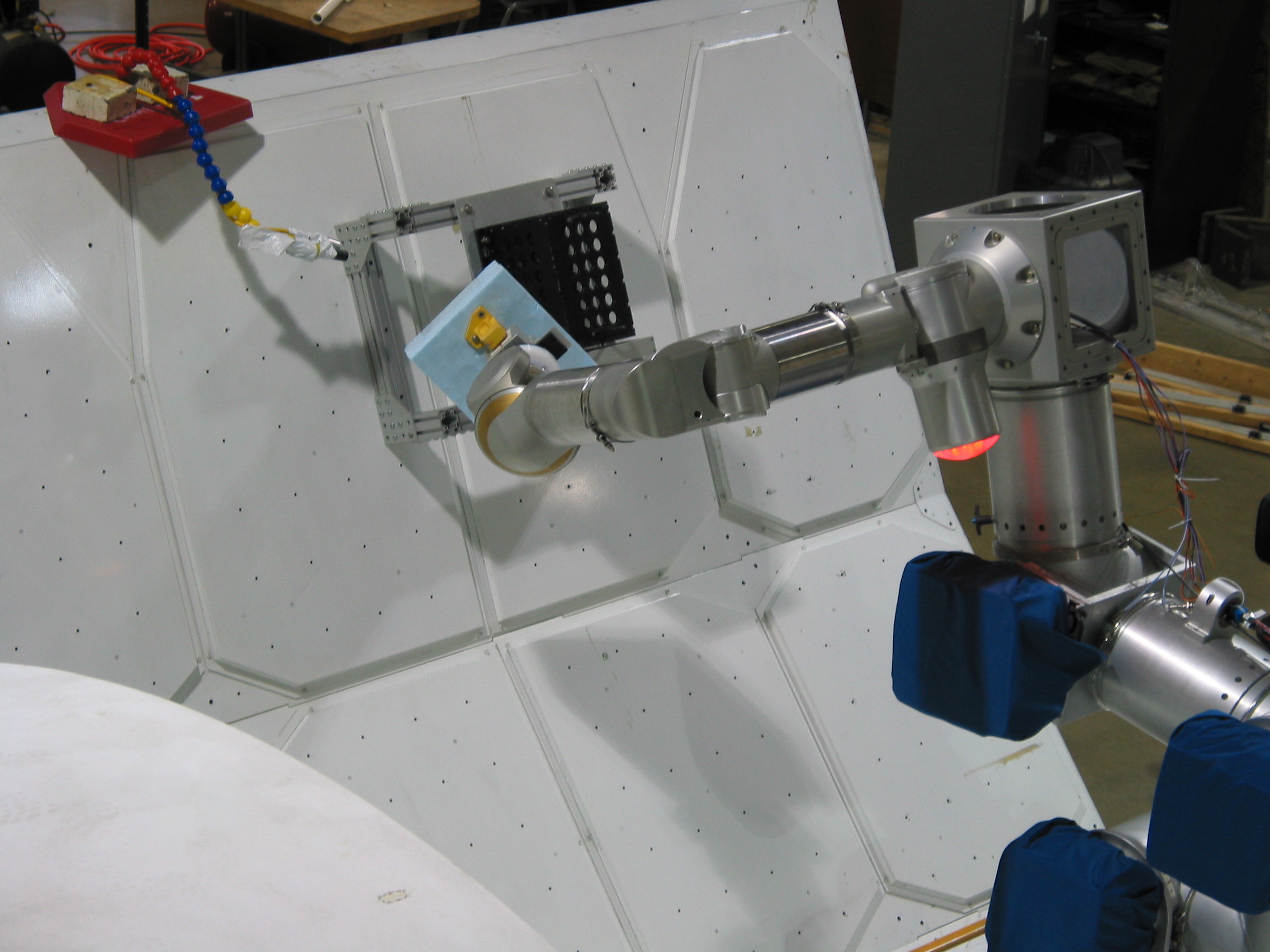
Engineering arm picking up and moving a simulated Rate Sensor Unit
2 June 2003
(update by Walt Smith, Brian Roberts, and Stephen Roderick)
The following pictures and video show the engineering arm picking up and moving a simulated Rate Sensor Unit. The video is at three times the normal speed.
|
Photos (click on the picture for a larger image) |
Video (click on the picture to start the video) |
|
|
|
|
|

Four Ranger undergrads graduate
22 May 2003
(update by Brian Roberts)
Four of the undergraduate students that are working on Ranger graduated today. Before they left for graduation, we presented them with a framed picture (see the update from the 7th of May) of most of the Ranger team underwater with the positioning leg. Pictured below from left to right are Wendy Frank, Eric Rodriguez, Meghan Baker, and Andrew Long. We wish them all luck as they start the next phase of their lives.

Click on the picture for a larger image (740K)
Right dexterous arm moving a Hubble Space Telescope Fine Guidance Sensor handhold
22 May 2003
(update by Brian Roberts, Stephen Roderick, and Walt Smith)
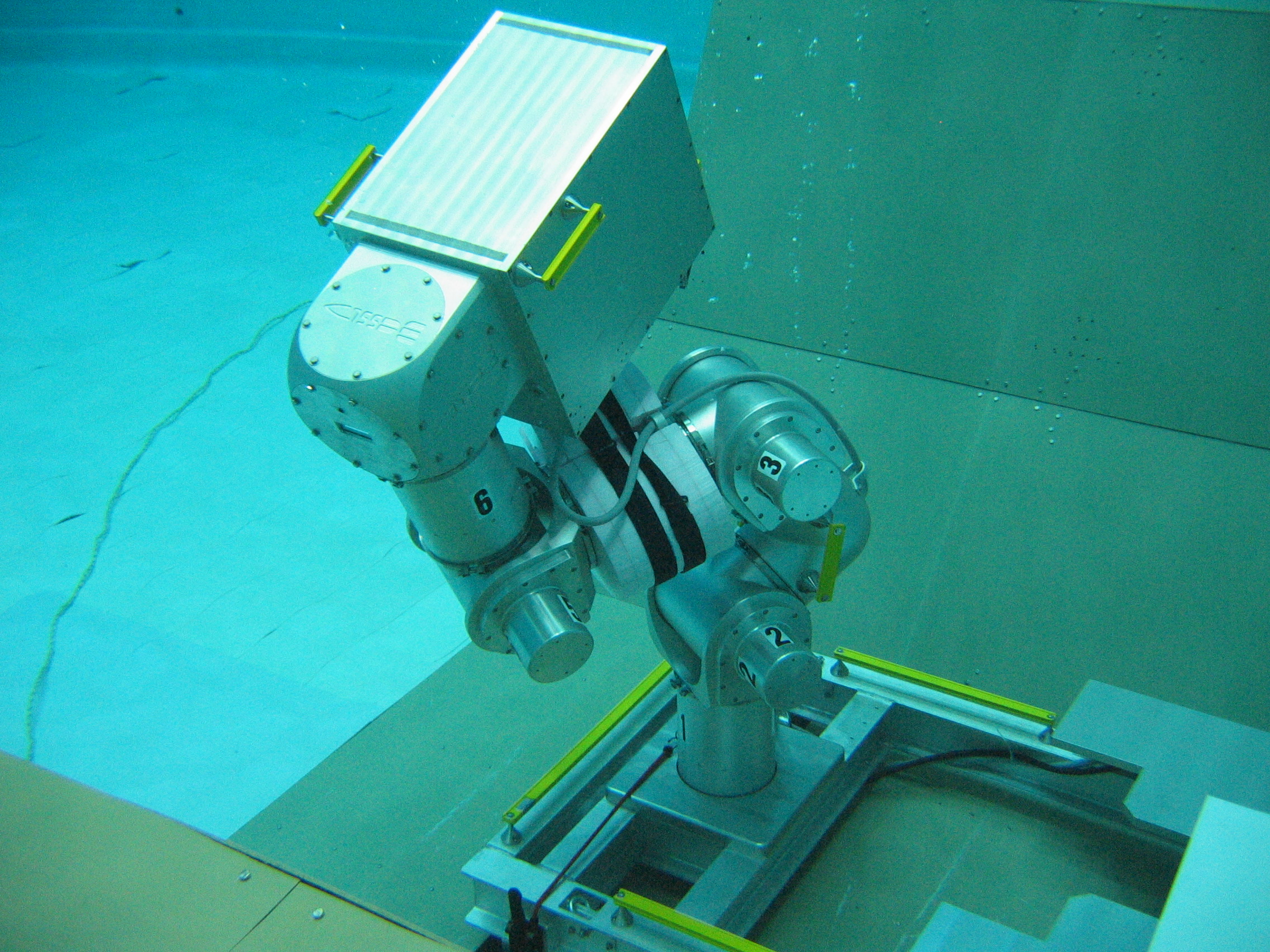
In a simulation of the ability of Ranger to assist astronauts servicing the Hubble Space Telescope, the right dexterous arm was used to move around a Fine Guidance Sensor (FGS) handhold.
One of the tasks planned for the next Hubble Space Telescope (HST) servicing mission is the changeout of one of HST's three FGSs. After a handhold is installed on the FGS by the astronauts, the handhold is used to guide the FGS along guide rails and out of the telescope. The FGS is then temporarily stowed on the aft fixture.
The following video show the Ranger right dexterous arm playing the role of the aft fixture. The video is at three times the normal speed.
Click on the picture to start the video (1.9M QuickTime)
Ranger team takes a break to pose with the positioning leg underwater
7 May 2003
(update by Brian Roberts)
The Ranger team took a break from a busy few weeks of demonstrations to pose with the positioning leg underwater at the Neutral Buoyancy Research Facility. Pictured from left to right in the front row is Jean-Marc Henriette, Wendy Frank, and Eric Rodriguez. In the back row from left to right, Meghan Baker, Andrew Long, Walt Smith, Brian Roberts, and Dave Akin. Stephen Roderick is hovering above the robot. Not pictured are Kevin Eisenhower, John Mularski, Kristin Pilotte, Mike Perna, and Brook Sullivan.

Click on the picture for a larger image (2.5M)
Engineering arm and right arm motion
28 April 2003
(update by Brian Roberts)
With the engineering and right dexterous arms together on the test stand, both arms were video taped during operation (click on the pictures to start the videos).
|
Separate The engineering arm and the right arm were each
controlled from different control stations by two separate operators
using two separate pairs on hand controllers. |
Together The engineering arm and the right arm were controlled
from the same control station using the same pair of hand controllers. |
DXR repair This video clip shows the engineering arm using a bare bolt drive to start removing the bolt that helps to hold the right elbow to the right shoulder. If you are interested in what would happen next, take a look at the video of the removal of the elbow from the right arm filmed late last year. |
Positioning leg declared operational
26 April 2003
(update by Brian Roberts)
Since November of 2002, progress has been made on getting the positioning leg (PXL), head, body, and boresight stereo video cameras in the water so that evaluation of the operation of Ranger in a simulated weightless environment could begin. Since that time, 15 dives have been conducted with over 17 hours of water time to get the system operational. This work culminated with the unveiling of the PXL, head, body, and boresight video camera at the campus-wide Maryland Day open house. During the open house, over 100 people ranging in ages from 2 to 80 controlled the system while it was in the water for an hour and a half.
Here is a partial list of what has been accomplished with the PXL:
- Automated multi-joint trajectory sequences run to take the PXL and body from its stowed configuration to a "seated" position and from the "seated" position to a worksite
- PXL stowed by running trajectory sequences in reverse
- PXL and body run in resolved rate mode
- Ranger Control Library run from two different locations on campus
- With the PXL and body in the water, the entire system was powered down and brought back up
- The PXL and body were controlled from multiple control stations
Below is a picture of the PXL in the water as well as some video clips of the motion underwater.
|
Photo (click on the pictures for larger images) |
Videos (click on the picture to start the video) |
|||
|
|
|
|
|
|




Take a look at the video of the PXL coming together from the ground up late last year.
University of Maryland Undergraduate Research Day poster presentations
23 April 2003
(update by Eric Rodriguez and Wendy Frank)
Two undergrads who are members of the Ranger team presented their work at this year's campus Undergraduate Research Day. Eric Rodriguez and Wendy Frank presented their independent research project on the determination of the natural frequency of the Ranger positioning leg.
2003 AIAA Midatlantic Regional Student Conference presentations
11 April 2003
(update by Eric Rodriguez, Wendy Frank, and Meghan Baker)
Three undergrads who are members of the Ranger team presented their work at this year's AIAA Midatlantic Regional Student Conference held on the University of Maryland Campus.
Eric Rodriguez and Wendy Frank presented their independent research project on the determination of the natural frequency of the Ranger positioning leg. A copy of Eric and Wendy's paper is available in the SSL Online Publications Database.
Meghan Baker presented her spring 2002 honors research project on the analysis she conducted of using Ranger to assist the astronauts with the servicing of the Hubble Space Telescope. A copy of Meghan's paper is available in the SSL Online Publications Database.
Ranger project featured on NASA's Robotics Education Project website
31 October 2002
(update by Brian Roberts)
The Ranger engineering arm was highlighted on NASA's Robotics Education Project website The NASA Robotics Education Project (REP) is dedicated to encouraging people to become involved in science and engineering, particularly robotics. REP works to capture the educational potential of NASA's robotics missions by supporting educational robotics competitions and events, facilitating robotics curriculum enhancements at all educational levels, and maintaining a web site clearinghouse of robotics education information.
© 2003- Space Systems Laboratory
last updated: