We have put together a slide summarizing the evolution of robotic manipulators in the SSL over the years. Click on the image below to view the summary.

(1.3 Mb PPT)
We have put together a slide summarizing the evolution of the Ranger dexterous robotic system over the years. Click on the links below the image to view different versions of the summary.

We have put together one page summaries for some of the robotics projects contained on this web site. Click on the images below to view the summaries.
Ranger Neutral Buoyancy Vehicle I
(2.3 Mb PDF)
Ranger Telerobotic Flight Experiment
(784 Kb PDF)
Ranger Flight Development Manipulator

(6 Mb PDF)
Ranger Neutral Buoyancy Vehicle II
(5.5 Mb PDF)
ASTEP Manipulator
(2.2 Mb PDF)

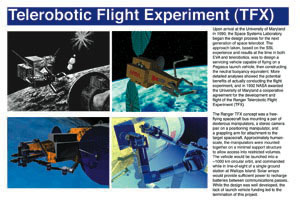
The automation, robotics, and machine intelligence systems (ARAMIS) study performed for NASA in 1980 analyzed the proposed "Great Observatories" to determine the task primitives in their servicing procedures. Of all the technologies considered for incorporation in space operations, the single most significant one was dexterous telerobotics. As illustrated in the concept to the left, a dexterous space telerobot was envisioned as capable of performing both planned and contingency repair and maintenance operations, greatly increasing the reliability and availability of on-orbit assets.

The Beam Assembly Teleoperator (BAT), shown at the left, was the first telerobot developed by the Space Systems Laboratory which was capable of some dexterous manipulations. The design task for this system was the teleoperated erection of the Experimental Assembly of Structures in EVA hardware from shuttle flight 61-B. BAT successfully completed this pure teleoperated assembly, in times approximately 50% slower than an inexperienced pressure-suited subject, and a factor of 9 slower than an experienced extravehicular activity subject.

The Beam Assembly Teleoperator (BAT) performs Space Station Freedom truss assembly.

Despite having only one manipulator, and the fact that it was specifically designed for a single type of structural assembly, the Beat Assembly Teleoperator (BAT) was used extensively to study telerobotic servicing. The photo to the left shows BAT performing a Wide Field/Planetary Camera change out on Hubble Space Telescope with an extravehicular activity partner providing fine alignment and voice feedback on the insertion process.





The Beam Assembly Teleoperator (BAT) is shown acting as an extravehicular activity (EVA) assistant in Hubble Space Telescope servicing tests, with the telerobot bringing tools and orbital replacement units to the EVA crew performing the dexterous servicing tasks.

The Beam Assembly Teleoperator (BAT) demonstrates the teleoperated rescue and return of a simulated incapacitated extravehicular activity subject.

One of the most productive extravehicular activity (EVA)/robotic teaming arrangements was the effective incorporation of robotic manipulator technologies into the immediate vicinity of the pressure suit. The Beam Assembly Teleoperator (BAT) was used to grapple the suit backpack, and provided body restraint to the human subject during Hubble Space Telescope servicing activities. As shown to the left, BAT's dexterous manipulator provided a "third hand" for the EVA subject, allowing a much more streamlined procedure for servicing by minimizing tool board manipulation and trips back and forth to the equipment storage locations.



The Multimode Proximity Operations Device (MPOD) is a mobility vehicle built to develop advanced control systems for telerobotics, including closed-loop control of attitude and position, and autonomous maneuvering. In the application shown in the photo to the left, an extravehicular activity (EVA) foot restraint was mounted to the front of MPOD, which stabilized the EVA subject and provided mobility (and, conceptually life support functions) during Hubble Space Telescope servicing activities.

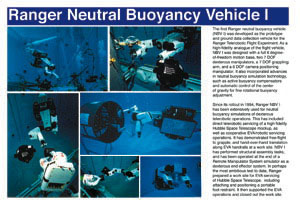
As shown in artist's concepts below, the Ranger Telerobotic Flight Experiment, approved by NASA in 1992, is a dexterous servicing spacecraft capable of orbital maneuvering, rendezvous and grappling with the target spacecraft, and servicing it through the use of two 8 degrees-of-freedom (DOF) dexterous manipulators, incorporating interchangeable end effectors that represent the robotic equivalent of the extravehicular activity tool kit. A 7 DOF grapple arm attaches Ranger to the work site and provides local positioning. A 6 DOF manipulator carries a pair of stereo video cameras to allow a wide ranger of camera views with minimal duplication of cameras.






Ranger Neutral Buoyancy Vehicle, the neutral buoyancy version of the Ranger Telerobotic Flight Experiment, shown in the photo to the left, demonstrated end-to-end removal and replacement of various spacecraft components, including the Electronics Control Unit from the Hubble Space Telescope. It also demonstrated a number of capabilities for the Ranger Telerobotic Flight Experiment, including remotely controlled free-flight to grapple and hand-over-hand robotic translation around a target spacecraft.


The dexterous Ranger Neutral Buoyancy Vehicle, aided by the Supplemental Camera and Maneuvering Platform (SCAMP), prepares an extravehicular activity (EVA) work site by opening access doors and placing EVA support interfaces, such as the portable foot restraint. SCAMP was used to perform a visual inspection of the work site to verify that the configuration matched the planned state. This allowed the EVA crew member to arrive at the site and immediately begin the complex servicing tasks (orbital replacement unit removal, for example). Ranger stood by with the replacement unit. The boxes were exchanged, and the EVA crew installed the new unit while Ranger stowed the old one. SCAMP provided an external video view. The EVA crew then left the work site, and SCAMP performed a visual quality control inspection prior to closeout. Ranger then closed and latched the access panel and removed and stowed the foot restraints, while SCAMP did a final inspection to verify that all tasks were successfully completed.




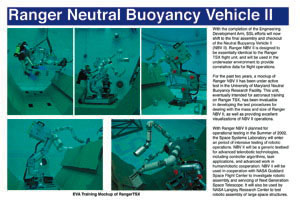
NASA decided in 1996 to modify the Ranger program to develop a low-cost robotic flight experiment to be flown on the space shuttle. This resulted in the deletion of the free-flying spacecraft bus, and the replacement of the grappling arm with a much more massive positioning leg. Ranger now became a fixed servicer, which was designed to access a series of experimental tasks mounted around the spacelab logistics pallet carrier in the shuttle cargo bay. The images below show a computer graphical representation of the shuttle-based version of Ranger.


The photos below show a full-scale mock-up of the shuttle-based version of Ranger undergoing evaluations in the Neutral Buoyancy Research Facility.







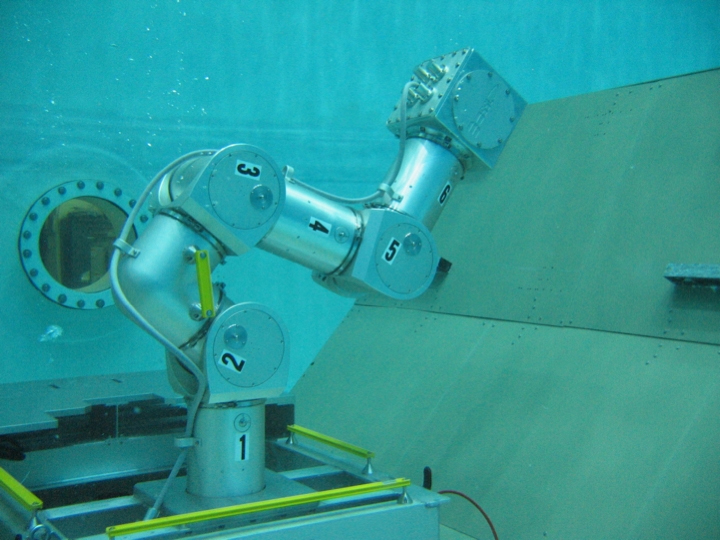
The Ranger dexterous manipulators.




{kind=link}
The positioning leg, head, and body of the Ranger Spacecraft Servicing System undergoing evaluations in the Neutral Buoyancy Research Facility.





The image to the left shows the concept of adding a Ranger dexterous manipulator to the fifth Hubble Space Telescope (HST) servicing mission. The arm includes two 20-inch link inserts to expand the reach envelope and it is mounted on the port sill of the Orbital Replacement Unit Carrier just ahead of the HST flight support structure. Under this concept, the Ranger arm would interact with the extravehicular activity (EVA) crew to provide a "third hand" for servicing tasks, including removing some hardware from launch restraints and providing a temporary stowage location for hardware following removal and prior to stowage for return to Earth. Preliminary estimates indicate that this minimal use of robotics will save more than an hour of EVA time over the nominal mission. Perhaps more importantly, the Ranger dexterous arm could provide a simplified strategy for replacing the WIde Field Camera in the event of a Remote Manipulator System failure.


Ranger manipulators perform multi-arm cooperation tests.



The photo to the left shows a full-scale mock-up of the Ranger Telerobotic Shuttle Experiment removing replacement batteries for the Hubble Space Telescope (HST) from the launch restraints, with Ranger mounted on the HST Orbital Replacement Unit Carrier.

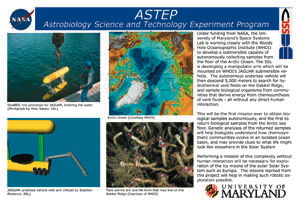
A test subject in a pressure suit stands in foot restraints mounted to one of the Ranger prototype dexterous manipulators. This system was used to demonstrate orbital replacement unit transfer.
A test subject in a pressure suit stands in foot restraints mounted to one of the Ranger prototype dexterous manipulators. This system was used to demonstrate positioning of standard extravehicular activity tool boards.


Starting in the summer of 2004, the Ranger Satellite Servicing System was modified to simulate Canada's Dextre robot. This allows Ranger to work through the procedures to robotically service the Hubble Space Telescope. Between October and December of 2004, the neutral buoyancy robot spent over 41 hours during 10 dives. Some photos from these dives appear below:




Taking the servicing "front end" from Ranger, NASA produced a concept for a servicer based on the Small Explorer-Lite bus from the series of Small Explorer spacecraft. This concept, shown at the left, would provide nearly "off-the-shelf" availability of the spacecraft bus and support systems, while accommodating the manipulators for complex dexterous servicing.



The Miniature Orbital Dexterous Servicing System, shown at the left, is a RASCAL-class free-flying robotic servicing system.


The Supplemental Camera and Mobility Platform (SCAMP) vehicles are compact enough to maneuver in close proximity to a pressure-suited subject, and provide more useful and controllable camera images than either fixed camera placement of helmet-mounted video sources. The first SCAMP vehicle has supported tests at every neutral buoyancy facility in the United States. The photo to the left shows SCAMP supporting STS-80 extravehicular activity crew training at the NASA/Johnson Space Center's Weightless Environmental Training Facility.




