Ranger is a spaceflight qualified dexterous robotic servicing system developed under funding from the National Aeronautics and Space Administration (NASA) as part of their Space Telerobotics Program. Building on more than twenty years of Space Systems Laboratory (SSL) experimental and theoretical research on Hubble Space Telescope (HST) robotic servicing, Ranger's design is based largely on the requirements for robotic servicing of HST.
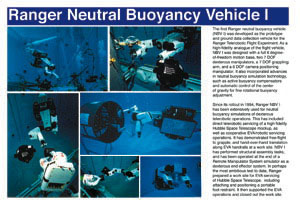
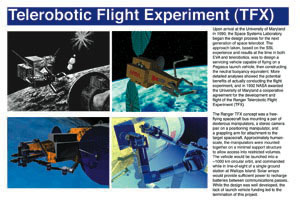
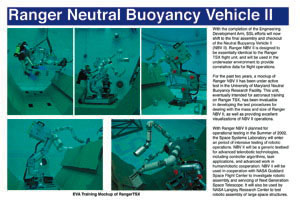
The free-flight version on Ranger, the Ranger Telerobotic Flight Experiment (RTFX), was designed in 1993 and a neutral buoyancy version of the system, Ranger Neutral Buoyancy Vehicle (NBV), has been operational at the SSL since 1995. Ranger NBV has served as a robotic prototype test bed for satellite inspection, maintenance, refueling, and orbit adjustment. It has demonstrated robotic tasks in neutral buoyancy such as robotic compatible orbital replacement unit changeout, complete end-to-end connect and disconnect of electrical connector, adaptive control for freefalling operation and station keeping, two-arm coordinated motion, coordinated multi-location control, and night operations. With a potential space shuttle launch opportunity, RTFX evolved into the Ranger Telerobotic Shuttle Experiment in 1996.
The Ranger Telerobotic Shuttle Experiment (RTSX) was to continue the vision of demonstration of dexterous robotic on-orbit satellite servicing. The robot was to be attached to a Spacelab pallet within the cargo bay of the space shuttle orbiter. Task ranging from simple calibration to complex dexterous operations not originally intended for robotic servicing were to be performed. The robot was to use interchangeable end effectors designed for different tasks and was to be controlled from the orbiter and from the ground.
Despite the formal termination of NASA support in 2001, pieces of the qualification unit are currently undergoing tests at the University of Maryland.
Click on the images below to download a one page summary describing various aspects of the Ranger project.
|
Ranger Neutral Buoyancy Vehicle I
|
Ranger Telerobotic Flight Experiment
|
||
|
|
|||
|
Ranger Flight Development Manipulator
|
Ranger Neutral Buoyancy Vehicle II
|
||

© 2003- Space Systems Laboratory
last updated: